Conçu pour l'exploration
Rapide à assembler et facile à utiliser, commencez à explorer le monde de la technologie dès aujourd'hui !
Préparez votre "Can". Préparez votre espace de travail. L'avenir dépend de VOUS !
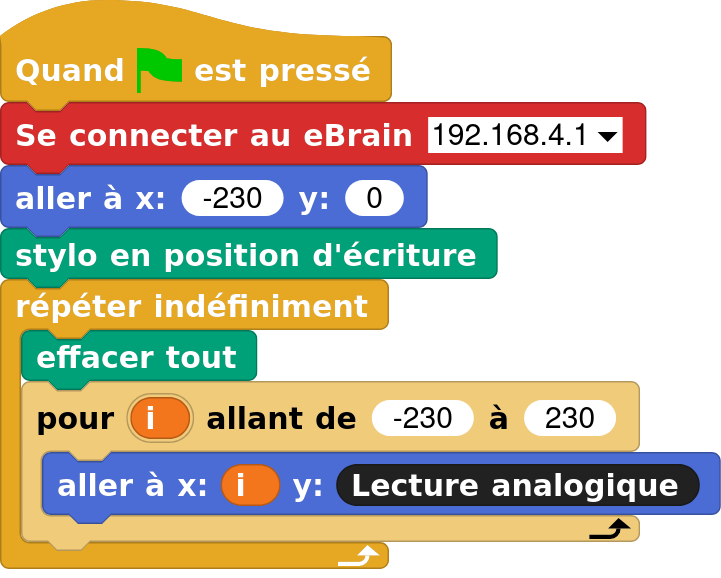
Ce manuel contient une série d'exercices qui vous permettront de vous familiariser avec les bases de l'électronique et du code. Il vous aidera à vous lancer dans l'aventure et à construire des robots ! Vous pouvez toujours suivre le programme d'études suggéré ou passer à l'activité suivante si vous préférez. Attachez vos ceintures de sécurité et préparez-vous à décoller!.